Copy and share this link on social network or send it to your friends
Copy| Product Name | JMT F4 Flight Control F4 PDB STM32 Integrated OSD 5V BEC Flight Controller for Reptile Martian II 220mm QAV-X 214 Drone |
| Item NO. | F31842 |
| Weight | 0.05 kg = 0.1102 lb = 1.7637 oz |
| Category | DIY RC Drone Accessories > Flight Control |
| Brand | JMT |
| Creation Time | 2019-09-12 |
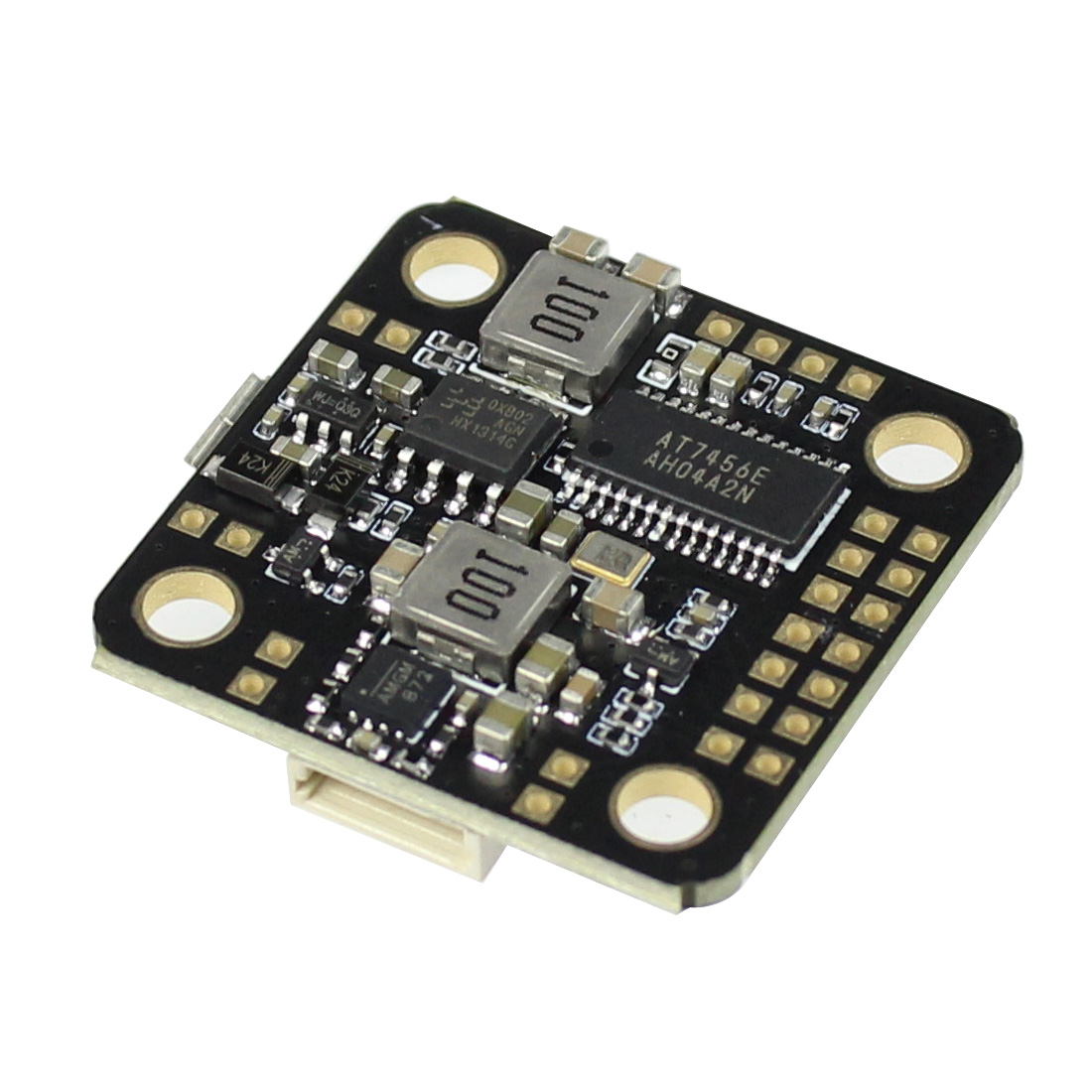
JMT F4 Flight Control F4 PDB STM32 Integrated OSD 5V BEC Flight Controller for Reptile Martian II 220mm QAV-X 214 Drone
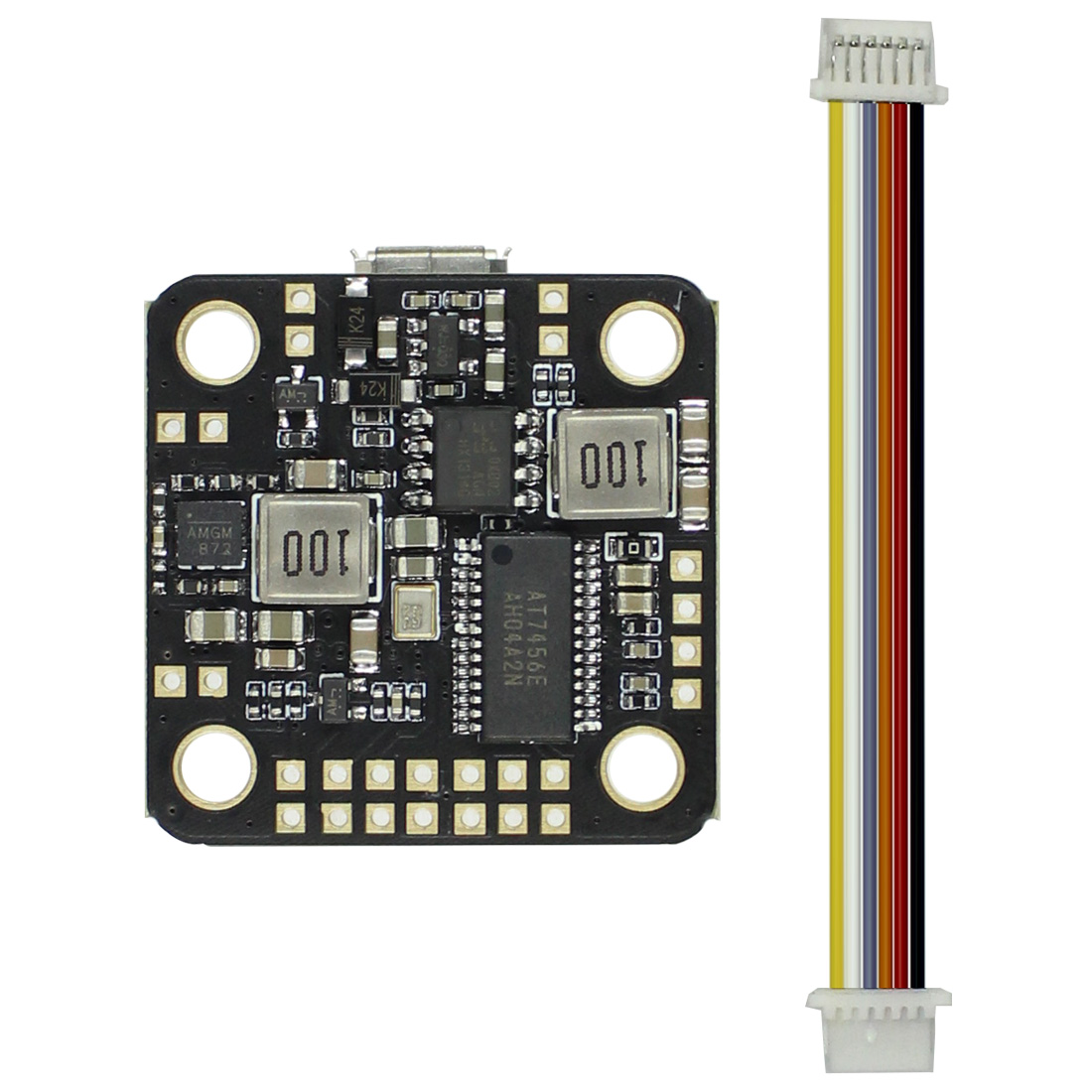
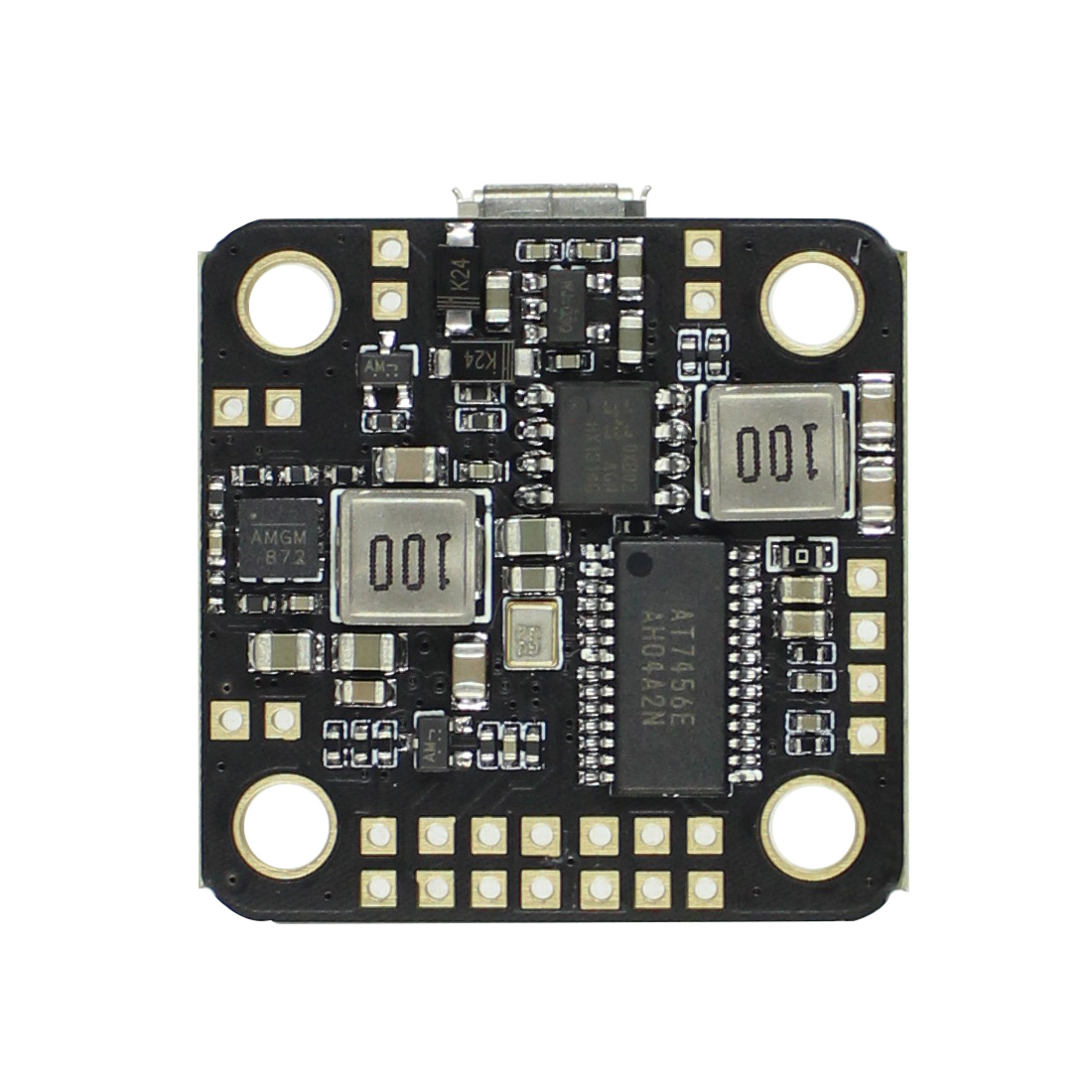
This is a use of STM32F405 with MPU6000 mainstream FPV small chassis with flight control, input voltage 2S-6S, BEC-5V output comes with 3A current, to support the market mainstream PPM, SBUS, IBUS, DSM2 / DSMX and so on machine. LED_STRIP interface, active buzzer interface. Integrated OSD function, support OSD parameters, support for the latest DSHOT ESC.
Factory default firmware: betaflight_3.2.0_OMNIBUSF4SD
Hardware Configuration:
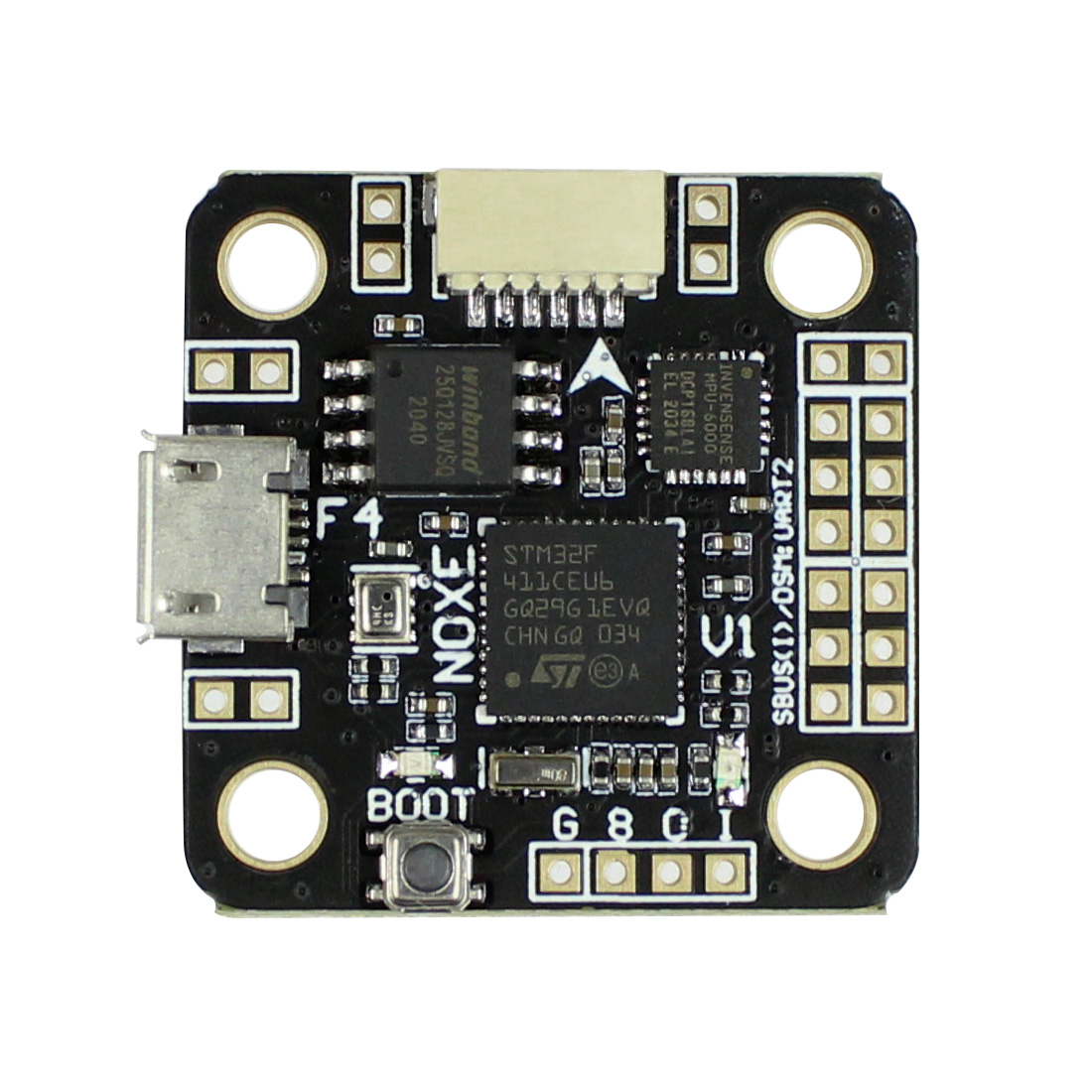
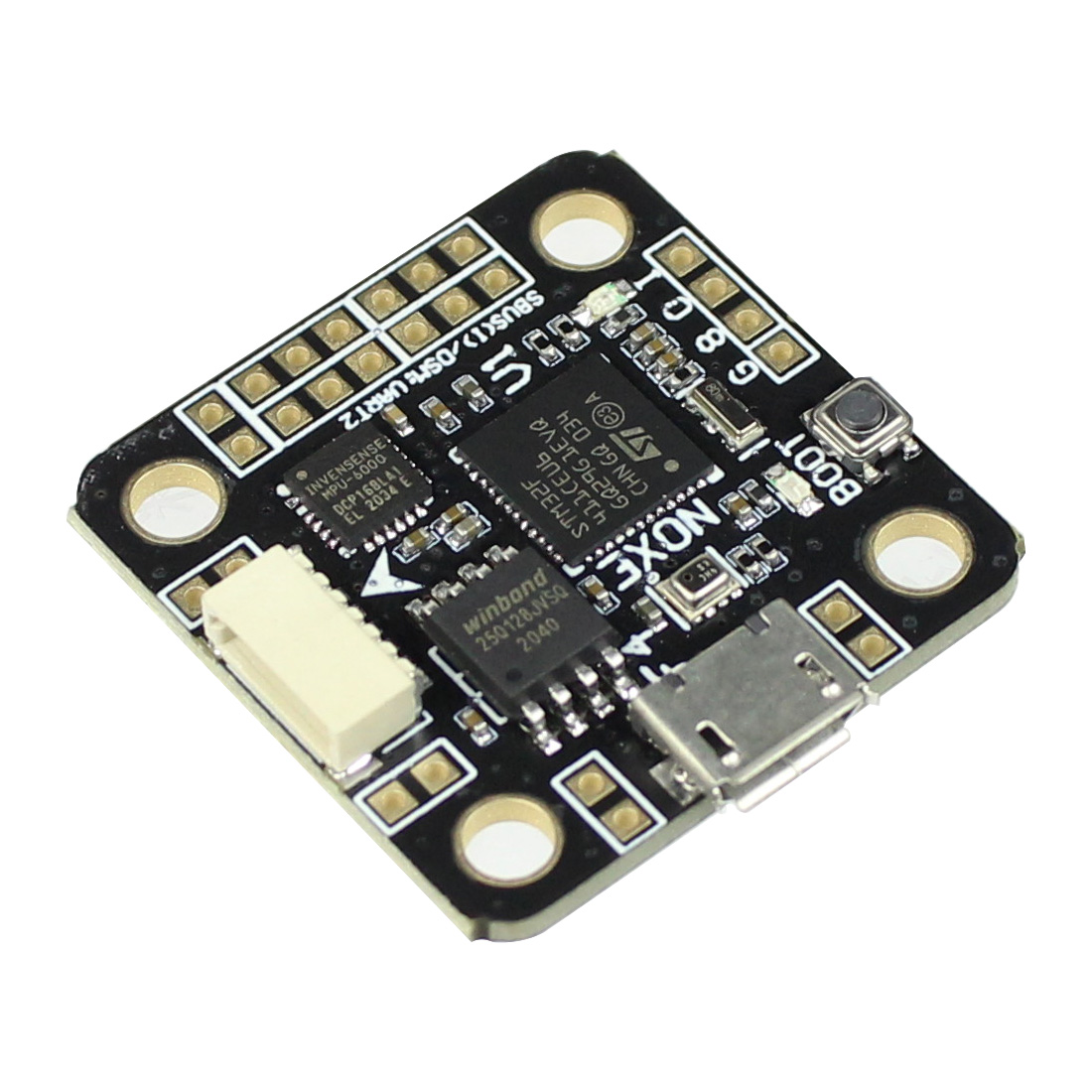
Master: STM32F405RGT6
Sensor:MPU6000
Receiver: Support PPM, SBUS, IBUS, DSM2 / DSMX and so on
LED_STRIP interface
Active buzzer interface
No black box
Built-in ammeter, current detection
OSD interface
Comes with BEC 5V 3A
Overall dimensions 42 * 36MM (including wire bonding pad length)
Screw hole spacing 30.5 * 30.5MM
Diameter 4.1MM
Weight 9.3 grams
Note: As before many customers reflect that the board has unstable shake problems with ICM20608 sensor, then now we use MOST Stable chip MPU6000 on the board.
New F4 flight control:
1. Using OMNIBUSF4 firmware
2. Master STM32F405 GRT6 refresh rate up to 8K.
3.PCB 3OZ copper thickness to enhance current stability and rapid cooling
4.BEC 5V3A output
5. Exposed pads for easy soldering and discarding traditional distribution boards.
6 compatible with all the ESC market
7. Flight Control IMU integrated OSD without brushing independent firmware, support BF ground station reference OSD
8. Integrated galvanometer, real-time monitoring current power consumption and other data
9. You can use the remote control to adjust the OSD data such as flight control PID
10. Open ports can be adjusted from the OSD map, such as power, frequency band, frequency (support for the function of the map such as Black Sheep Legend, and the upcoming DYS map)
11.F4 flight control using an independent four damping ball, can filter out the vibration of the motor, so that flight experience better
ESC M1-M4: Connect the power cord
V + -V-: corresponding to the ESC power line positive and negative, with '-' for the ground.
B + - B-: Lithium battery input
BOOT: BOOT button (used as brush firmware)
+5 V: With 3A output, can be connected to the picture, receiver, camera.
GND: Ground
Vout: video output, then picture transmission image signal line
Vin: video input, then camera signal cable
LED: Programmable LED_Strip signal line output
RX6 (S): Connect the SBUS receiver here
RX1 (D): Connect DSM2 / DSMX / IBUS receiver here
PPM: Here PPM receiver
VBAT: Wide voltage picture positive power supply (with battery voltage synchronization), where the voltage is the power voltage
BUZ +, BUZ-: BB ring at the line (only supports active buzzer, distinguish between positive and negative)
RX3, TX3: Serial port URAT3
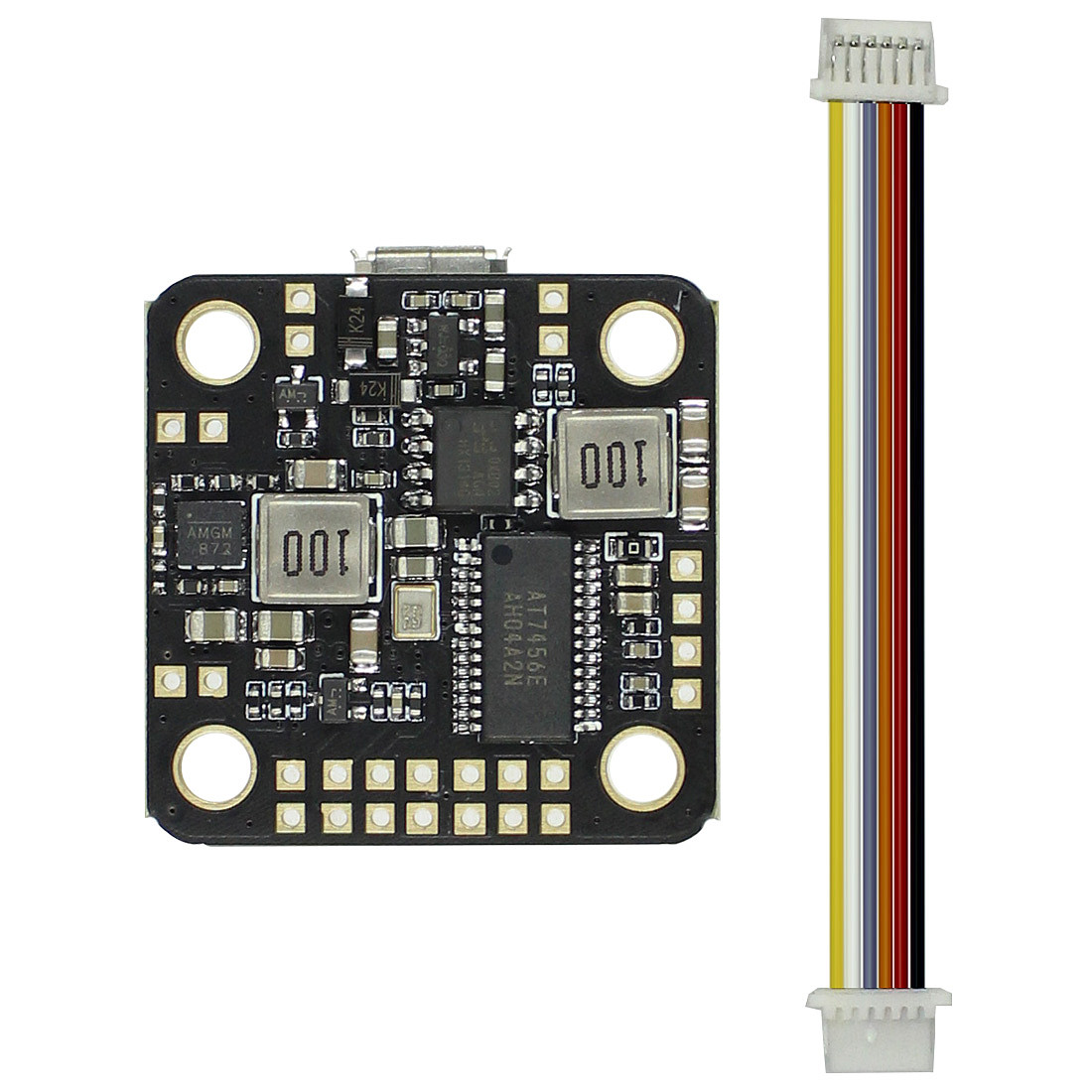
1 X Omnibus F4 PDB Flight Control
4 x Anti-vibration Rubber Ball







 JH60875 Mamba MK4 F722APP/F55_128K Equipment Tower For FPV Crossing Machine")


SKYPE: +8615012643826
Email:yxy@xt-xinte.com










No related record found