




|
| Product Name | JMT DIY RC Drone Kit Parts F4 Flight Control Razor32 V2 35A 3-6S ESC 2306 2400KV Brushless Motor XT60 Connector Cable for FPV Racing Drone Quadcopter |
| Item NO. | F32802-C |
| Weight | 0.284 kg = 0.6261 lb = 10.0178 oz |
| Category | DIY RC Drone Accessories > DIY RC Drone Kit |
| Brand | JMT |
| Creation Time | 2019-11-11 |
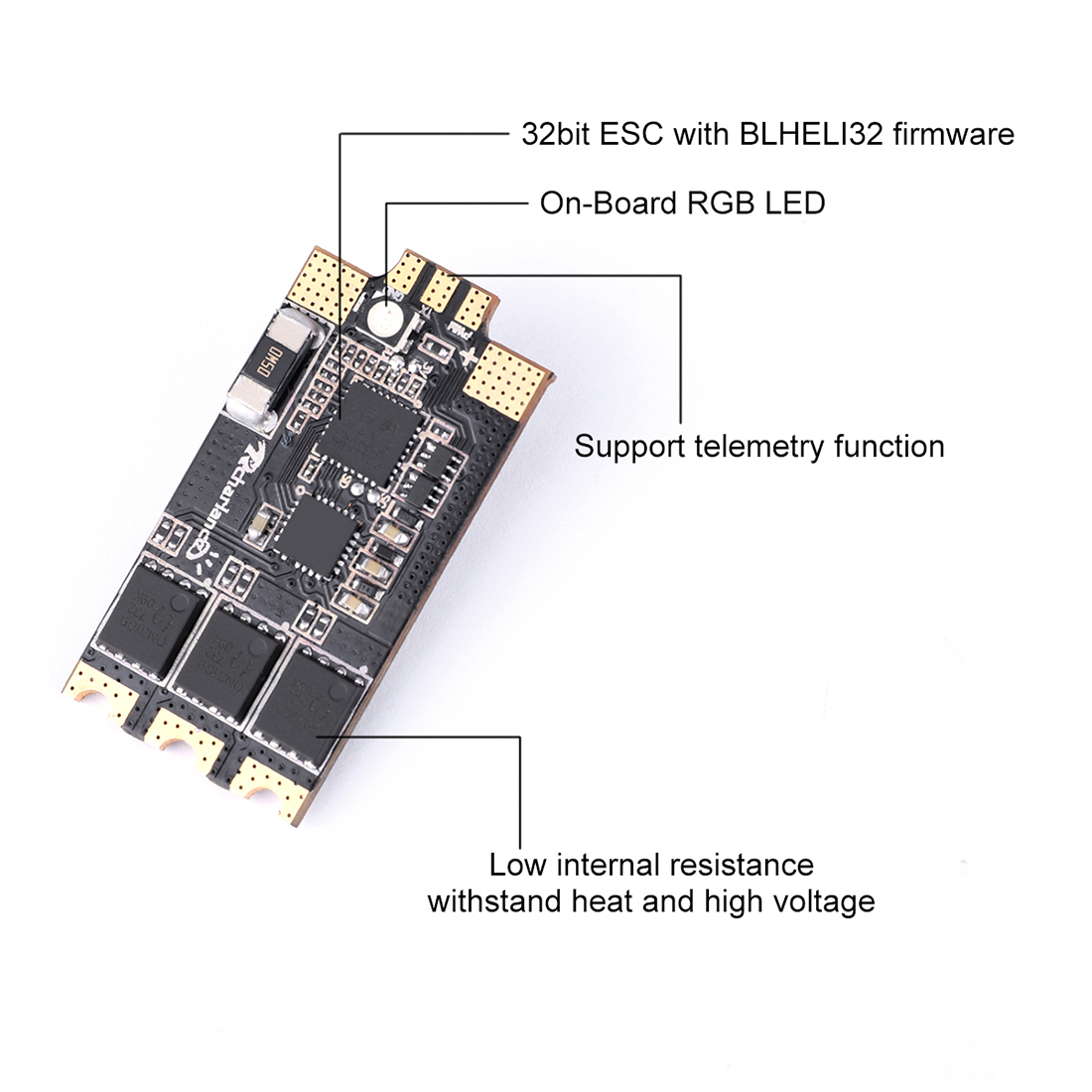
New F4 flight control:
1. Using OMNIBUSF4 firmware
2. Master STM32F405 GRT6 refresh rate up to 8K.
3.PCB 3OZ copper thickness to enhance current stability and rapid cooling
4.BEC 5V3A output
5. Exposed pads for easy soldering and discarding traditional distribution boards.
6 compatible with all the ESC market
7. Flight Control IMU integrated OSD without brushing independent firmware, support BF ground station reference OSD
8. Integrated galvanometer, real-time monitoring current power consumption and other data
9. You can use the remote control to adjust the OSD data such as flight control PID
10. Open ports can be adjusted from the OSD map, such as power, frequency band, frequency (support for the function of the map such as Black Sheep Legend, and the upcoming DYS map)
11.F4 flight control using an independent four damping ball, can filter out the vibration of the motor, so that flight experience better
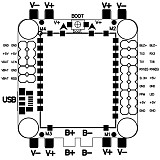
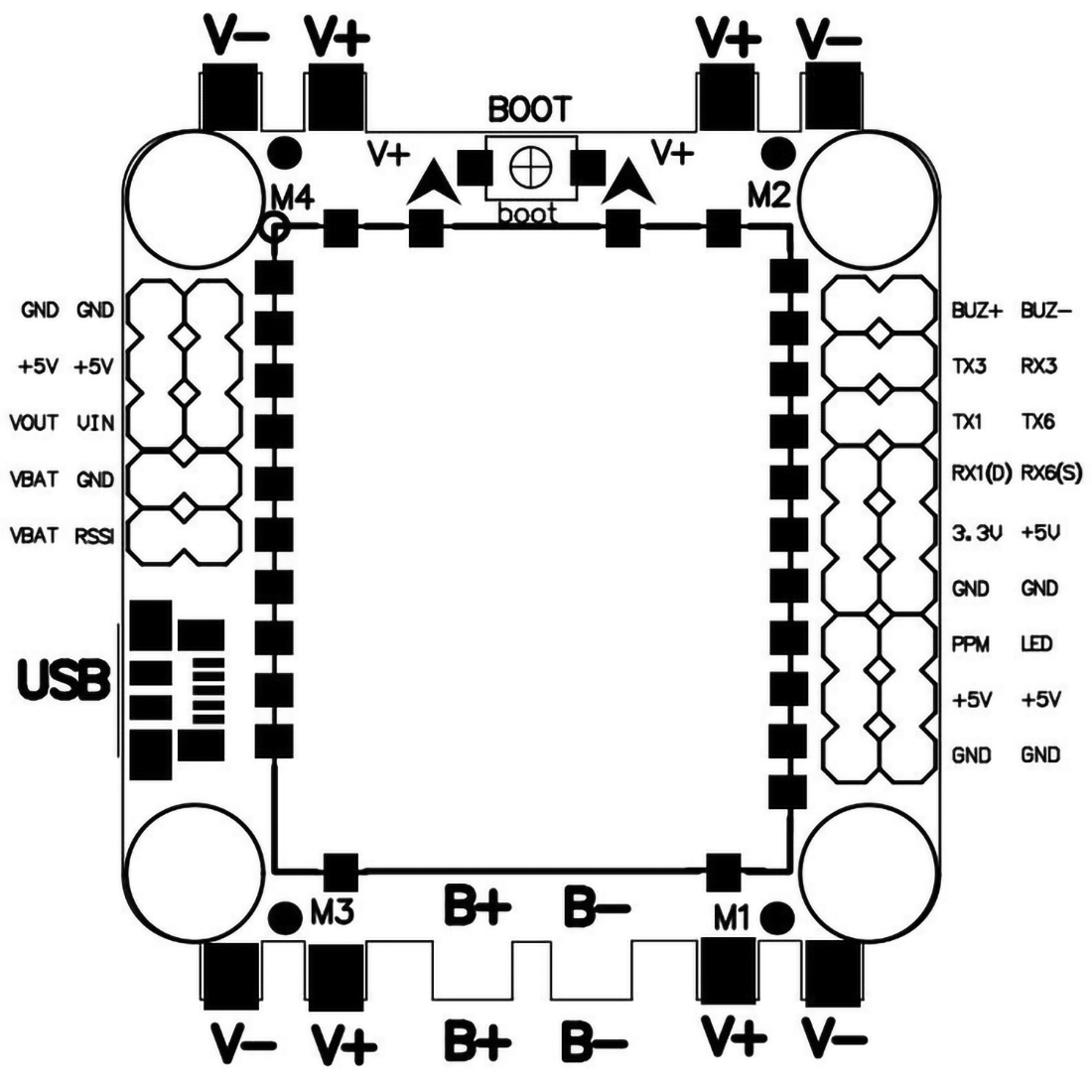
ESC M1-M4: Connect the power cord
V + -V-: corresponding to the ESC power line positive and negative, with '-' for the ground.
B + - B-: Lithium battery input
BOOT: BOOT button (used as brush firmware)
+5 V: With 3A output, can be connected to the picture, receiver, camera.
GND: Ground
Vout: video output, then picture transmission image signal line
Vin: video input, then camera signal cable
LED: Programmable LED_Strip signal line output
RX6 (S): Connect the SBUS receiver here
RX1 (D): Connect DSM2 / DSMX / IBUS receiver here
PPM: Here PPM receiver
VBAT: Wide voltage picture positive power supply (with battery voltage synchronization), where the voltage is the power voltage
BUZ +, BUZ-: BB ring at the line (only supports active buzzer, distinguish between positive and negative)
RX3, TX3: Serial port URAT3
4. High performance motors for crossing and tailoring.









SKYPE: +8615012643826
Email:yxy@xt-xinte.com




No related record found